M20為衛(wèi)導(dǎo)模組,可輸出GNSS原始觀測量及GNSS解算結(jié)果;M21/M22為組合導(dǎo)航模組,內(nèi)置慣性導(dǎo)航單元IMU及深耦合組合導(dǎo)航算法,不僅可以輸出GNSS原始觀測量及GNSS解算結(jié)果,還可輸出IMU原始數(shù)據(jù)及融合解算結(jié)果等。
如需要產(chǎn)品支持幫助,歡迎您聯(lián)系我們
在復(fù)雜的環(huán)境中提供更高動態(tài)、更好的抗干擾、更高可靠的高精度定位服務(wù)。
M20為衛(wèi)導(dǎo)模組,可輸出GNSS原始觀測量及GNSS解算結(jié)果;M21/M22為組合導(dǎo)航模組,內(nèi)置慣性導(dǎo)航單元IMU及深耦合組合導(dǎo)航算法,不僅可以輸出GNSS原始觀測量及GNSS解算結(jié)果,還可輸出IMU原始數(shù)據(jù)及融合解算結(jié)果等。
M2系列冷啟動時間典型值為30s,熱啟動時間典型值為5s。
對應(yīng)關(guān)系為:uart0-com1;uart1-com2;uart2-com3;uart3-com4。
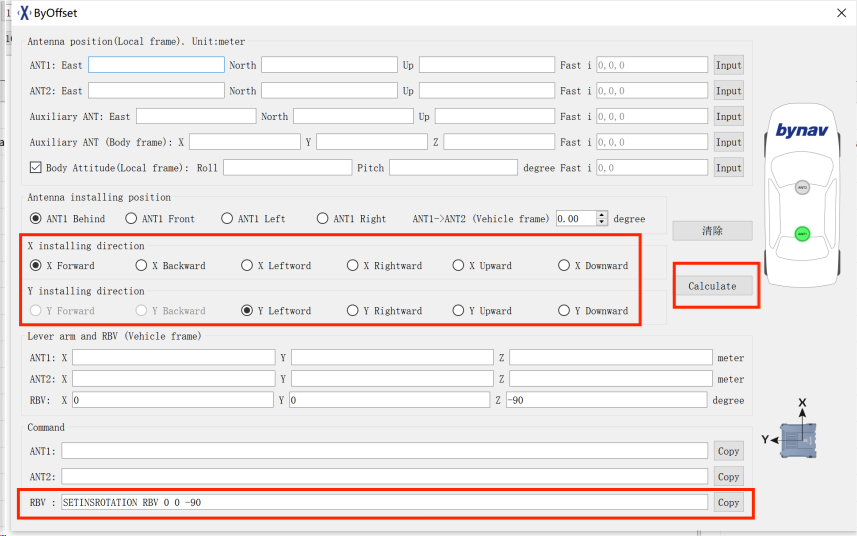
建議使用北云上位機軟件BY_CONNECT中ByOffset功能進行RBV的快速計算以及配置:如圖所示,在ByOffset中選擇北云設(shè)備實際安裝X軸以及Y軸朝向,點擊Calculate按鈕將在RBV欄中生成相應(yīng)RBV配置指令,點擊Copy復(fù)制后,將指令通過BY_CONNECT指令輸入窗口發(fā)送至設(shè)備,繼續(xù)發(fā)送SAVECONFIG指令保存,以及REBOOT指令重啟即可完成配置。
組合導(dǎo)航對準是指姿態(tài)初始化的過程:慣性導(dǎo)航系統(tǒng)(INS)通過積分慣性傳感器的測量值來計算導(dǎo)航結(jié)果,即導(dǎo)航方程的每 一次迭代,都需要利用前一次的位置、速度、姿態(tài)等導(dǎo)航參數(shù)作為其初始值。因此,在使用INS提供導(dǎo)航結(jié)果前,必須要對它進行初始化。INS初始的位置和速度信息需要外部提供,在GNSS/INS組合導(dǎo)航系統(tǒng)中,初始的位置和速度信息是由GNSS接收機提供。此外,還可以采用將INS放置在預(yù)先測量的已知位置點附近等方式進行初始化。此時,INS通過外部信息,已經(jīng)知道了它在外界所處的位置和已有的速度,但仍無法確定的是,當它測量到自身在X軸方向存在加速運動時,或在以Y軸為旋轉(zhuǎn) 軸發(fā)生轉(zhuǎn)動時,究竟在外界是朝向哪里加速運動,或在以哪里為軸發(fā)生轉(zhuǎn)動。因此,INS還要初始化姿態(tài)。
組合導(dǎo)航校準是指坐標系旋轉(zhuǎn)參數(shù)RBV值的校準過程:由于安裝組合導(dǎo)航系統(tǒng)時,整機坐標系和載體(車輛)坐標系的軸向可能不完全重合,因此不能直接將整機坐標系的朝向作為載體的朝向來實現(xiàn)運動約束,而是要先通過設(shè)置RBV參數(shù),來調(diào)整整機與載體姿態(tài)的相對關(guān)系,使得整機坐標系和載體(車輛)坐標系的軸向盡量重合,以實現(xiàn)運動約束。由于設(shè)備安裝無法保證絕對精確,輸入的RBV與實際安裝可能會存在偏差,因此需要校準RBV值。
由于安裝組合導(dǎo)航系統(tǒng)時,整機坐標系和載體(車輛)坐標系的軸向可能不完全重合,因此不能直接將整機坐標系的朝向作為載體的朝向來實現(xiàn)運動約束,而是要先通過設(shè)置RBV (Rotation from Body to Vehicle)參數(shù)來調(diào)整整機與載體姿態(tài)的相對關(guān)系,使得整機坐標系和載體(車輛)坐標系的軸向盡量重合以實現(xiàn)運動約束。由于設(shè)備安裝無法保證絕對精確,輸入的RBV與實際安裝可能會存在偏差,因此需要校準RBV值。
RBV 誤差主要對導(dǎo)航信息中的車體姿態(tài)產(chǎn)生影響,也會因桿臂配置的坐標系而對導(dǎo)航中心和方位角產(chǎn)生一定程度的影響。由此產(chǎn)生的影響主要體現(xiàn)在陸地模型中,衛(wèi)星信號良好時無明顯異常,而衛(wèi)星信號丟失時的誤差發(fā)散尤為明顯,此時由RBV誤差產(chǎn)生的姿態(tài)和位置偏差將隨時間而愈加明顯。
天線桿臂測量誤差需≤5cm。NHC(Non-Holonomic Constrain)即為非完整性約束,用于針對符合特殊模型假設(shè)的載體進行運動約束。依據(jù)載體模型在運動方面的限制,與運動假設(shè)不相符合的部分都將被視作誤差進行約束修正。
兩者存在一定區(qū)別,INS中航向角Azimuth為車體系坐標中Y軸正半軸與真北的夾角,而Heading則為主天線至從天線的向量與真北的夾角。
需確保設(shè)備穩(wěn)固可靠安裝,確保設(shè)備、天線和載體三者的相對位置固定不變。設(shè)備建議安裝在后輪軸中心附近并確保它們與車體剛性連接即可。
定向和RTK原理上是一樣的,都是載波相位差分。只是定向時,相當于基準站(主天線)是動態(tài)的。
以BESTPOSA為例:

①~⑨分別為標準消息標頭、結(jié)算狀態(tài)、定位狀態(tài)、緯度、經(jīng)度、海拔高、高程異常值、坐標系ID、可視衛(wèi)星數(shù)等;其他報文字段詳細對應(yīng)關(guān)系可參閱《UG016_數(shù)據(jù)通信接口協(xié)議》。
北云板卡默認支持差分協(xié)議是RTCM3.3-MSM4,基準站目前只支持播發(fā)RTCM3.3-MSM4;
定向精度一般默認指方位角。方位角是主天線到從天線之間形成的矢量與真北之間的夾角。兩個天線相位中心之間的長度叫基線長度。當基線長度為1米時,定向精度一般為0.2° RMS 。當基線長度為3米時,定向精度一般為0.067° RMS (也可以描述為3米基線一個密位)。
雙天線定向時,會先解算出主天線的位置,然后直接解算出主天線到從天線的矢量結(jié)果,包括基線長度、俯仰角和方位角。
差分數(shù)據(jù)的字節(jié)數(shù)和接收到的衛(wèi)星數(shù)有關(guān),衛(wèi)星數(shù)越多,差分數(shù)據(jù)量越大。當基準站收到30顆衛(wèi)星時,差分數(shù)據(jù)量約700字節(jié)/秒;查看差分數(shù)據(jù),可將基準站控制串口數(shù)據(jù)格式改為RTCM,輸出的二進制數(shù)顯示為亂碼,使用HEX顯示,若看到數(shù)據(jù)頭為D3 00,則是正確的差分數(shù)據(jù)格式。
能否進入固定解衛(wèi)星數(shù)只是一個方面,還要看收到衛(wèi)星的信號質(zhì)量、衛(wèi)星分布幾何因子、衛(wèi)星健康狀態(tài)、多路徑干擾等情況。一般而言,單系統(tǒng)至少7顆雙頻衛(wèi)星。若雙頻衛(wèi)星信號數(shù)量少或者接收到的衛(wèi)星信號的信號質(zhì)量較差,將影響GNSS板卡或接收機的工作性能,甚至無法正常工作。
在信號處理上,通過并行多相關(guān)器抑制多徑誤差,并給出信號多徑指示。在定位解算上,結(jié)合多徑指示、信號強度、衛(wèi)星仰角對觀測數(shù)據(jù)加權(quán)解算。此外,利用部分模糊度搜索來排除多徑嚴重衛(wèi)星對解算的影響。
復(fù)雜城市環(huán)境中,板卡通過自適應(yīng)環(huán)路跟蹤來快速響應(yīng)信號的遮擋、金屬反射等外部環(huán)境引起的信號突變,保持信號的持續(xù)穩(wěn)定跟蹤和信號中斷后的迅速恢復(fù)。目前最大的技術(shù)優(yōu)勢就是動態(tài)抗遮擋性能。